第一反应想到这个图:

看起来像是合成的,但其实是真的。有三个关键:
一、弹簧的弹性系数要足够低;
二、弹簧的密度相对于弹性系数,要足够大;
三、弹簧要足够长。
如果去做一点简单的受力分析,就会发现其实原理非常简单。
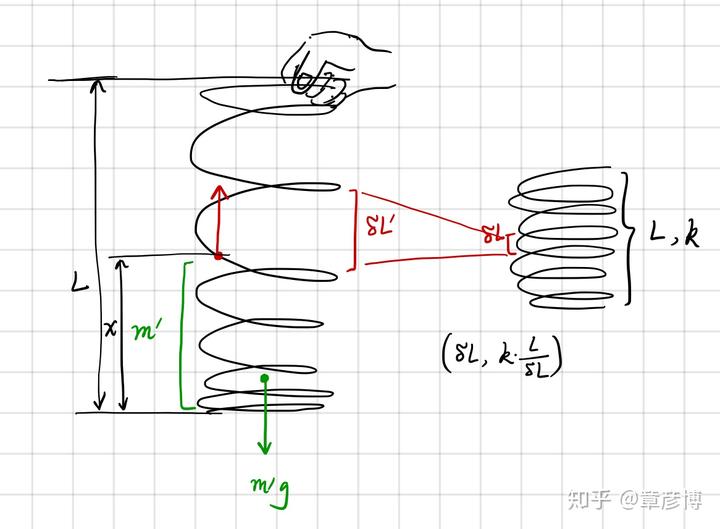
简单的受力分析如上图。弹簧的每一个小部分的形变,会产生一个拉力,而这个拉力恰好可以抵消下面弹簧的重力。
松手之后,弹簧顶部失去拉力,在弹性势能、引力势能的作用下,加速下降。而弹簧底部则因为局部没有形变,所以重力与弹力仍然相等,所以会「悬浮」在那里,不发生位移。
弹簧顶部在松手之后,会因为弹力与重力的共同作用,加速向下。
在这个时候,需要注意一点,那就是弹簧中机械波的传递速度是有限的,也就是在这个系统中的「声速」。这个时候,只要弹簧的性质在合适的范围内(弹性系数低,弹簧密度大),那弹簧中的声速就会足够低。
而在经过一小段时间的加速之后,由于还有重力的加持,顶部弹簧的速度就会超过机械波的传递速度。也就是在这个系统中,顶部的弹簧「超音速」了。这样下面的弹簧就几乎「感觉」不到上面发生了什么。机械波产生的形变传递的速度,还不如顶部弹簧下落的速度。
这种情况下,在弹簧缩成一团之前,弹簧底部都是不会运动的。
做一个半定量的分析:
比如图中标记的那个红点,下面的弹簧质量假设是
,那我们其实可以计算弹簧各部分的拉伸率。如果用
表示未拉伸的弹簧的位置的话(以底部为 0),那么不同位置的拉伸率就是线性增长的。而在拉伸之后的弹簧上,则是二次方的关系。
简单来说,弹簧上方的拉伸率大,产生足够的力拉起下面的弹簧;而下面的拉伸率低,所需拉起的弹簧重量也比较低。而在上面的图中,这种结构非常明显。
列了一个简化了的微分方程:
做出的图大概是这样的:
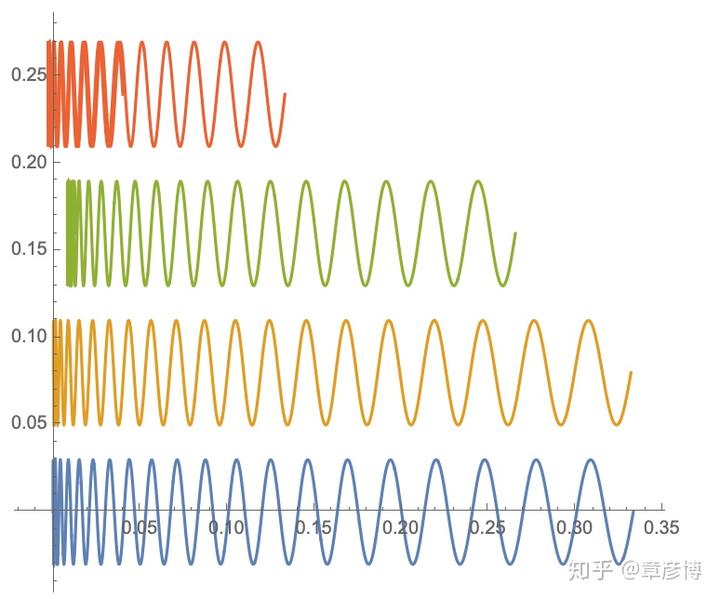
与实验有些差别,主要是方程的边界条件没设好,在两端会出一点问题……不过定性的性质还是保留了的
 微信扫一扫
微信扫一扫